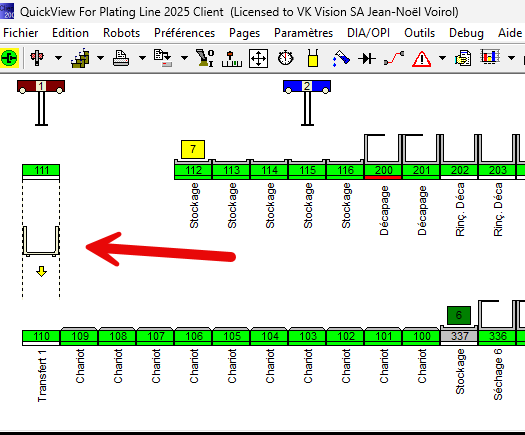
Interface avec les transferts
Les transferts permettent le transport de charges d'une branche de la machine à une autre branche. Les transferts sont représentés comme suit:
Dans QuickView, il est possible de définir 4 transferts au maximum. Ils sont définis dans le fichier VKServer.ini dans les sections [ShuttleX]
;---------------> SHUTTLE
[SHUTTLE1]
Db=29
RegCommand=0
RegStatus=1
Mode=1
DefaultMachine=0
[SHUTTLE2]
Db=29
RegCommand=3
RegStatus=4
Mode=1
DefaultMachine=1
Les mots clef suivant sont possibles:
| Mot clef | Type | Description |
| DB | Integer | Numéro de databank dans lequel se trouve les registres de statut et de commande |
| DBCom | Integer | Numéro de databank si le DB de statut et différent du DB de commande |
| RegComand | Integer | Numéro de registre dans lequel les commandes sont écrites |
| RegStatus | Integer | Numéro de registre dans lequel les statuts sont écrits par l'automate |
| Mode | Integer |
Mode de fonctionnement une fois la charge déposée dans la destination: 0: Renvoie le transfert à la position d'origine. 1: Renvoie le transfert à la position par défaut. 2: Renvoie le transfert à la machine dont un mouvement robot est prévu. 3: Ne rien faire |
| DefaultMachine | Integer | Numéro de la branche de la machine dans laquelle le transfert est envoyé à la fin d'un mouvement |
Le registre de statut est constitué comme suit:
| Bits | Description |
| 0 | Le transfert se trouve dans la branche 0 de la machine |
| 1 | Le transfert se trouve dans la branche 1 de la machine |
| 2 | Le transfert se trouve dans la branche 2 de la machine |
| 3 | Le transfert se trouve dans la branche 3 de la machine |
| 4 | Le transfert se déplace vers la branche 0 de la machine |
| 5 | Le transfert se déplace vers la branche 1 de la machine |
| 6 | Le transfert se déplace vers la branche 2 de la machine |
| 7 | Le transfert se déplace vers la branche 3 de la machine |
Le registre de commande est constitué comme suit:
| Bits | Description |
| 0 | Demande de déplacement vers la branche 0 de la machine |
| 1 | Demande de déplacement vers la branche 1 de la machine |
| 2 | Demande de déplacement vers la branche 2 de la machine |
| 3 | Demande de déplacement vers la branche 3 de la machine |
Il existe d'autres mots clef utilisés par les transferts:
| Mots clef | Type | Valeur par défaut | Description |
| Parameters.ini[System]CheckMovementOverShuttlePrio | Boolean | 0 | Avant d'envoyer un transfert dans une branche de la machine, le système doit vérifier si un mouvement d'un robot est en cours au dessus d'une position d'un transfert. Si actif, la vérification est effectuée en mode prioritaire. |
| Parameters.ini[System]NoMoveToNearesetShuttlePrio | Boolean | 0 | Lorsqu'un robot a pris une charge dans une position ayant pour destination un transfert, il se déplace à la position la plus proche du transfert si le transfert est en cours de déplacement. Si ce mot clef est activé, le robot ne se déplace pas vers la position la plus proche, il attend au dessus de la position sur laquelle il a pris la charge. |
| Parameters.ini[System]PrioOverLoadedShuttle | Boolean | 0 | Si mot clef est activé cela indique au système qu'il n'est pas autorisé à un robot de se déplacer au dessus d'un transfert chargé. |
| Parameters.ini[System]Shuttle1 | Integer | 30 | Temps de déplacement du transfert 1 d'une branche à l'autre en secondes. |
| Parameters.ini[System]Shuttle2 | Integer | 30 | Temps de déplacement du transfert 2 d'une branche à l'autre en secondes. |
| Parameters.ini[System]Shuttle3 | Integer | 30 | Temps de déplacement du transfert 3 d'une branche à l'autre en secondes. |
| Parameters.ini[System]Shuttle4 | Integer | 30 | Temps de déplacement du transfert 4 d'une branche à l'autre en secondes. |
| Parameters.ini[System]ShuttleFree1 | Integer | 60 | Temps libre nécessaire pour le calcul d'utilisation du transfert 1. |
| Parameters.ini[System]ShuttleFree2 | Integer | 60 | Temps libre nécessaire pour le calcul d'utilisation du transfert 2. |
| Parameters.ini[System]ShuttleFree3 | Integer | 60 | Temps libre nécessaire pour le calcul d'utilisation du transfert 3. |
| Parameters.ini[System]ShuttleFree4 | Integer | 60 | Temps libre nécessaire pour le calcul d'utilisation du transfert 4. |
| VKServer.ini[System]DoNotCheckShuttleMoving | Boolean | 0 | Si activé, le système ne vérifie pas les bits de statut indiquant le déplacement d'un transfert pour positionner un robot |
No comments to display
No comments to display