Manuel d'utilisation
Pour lancer l'application, naviguer vers https://vkvision.ch/VKTimeway La page suivante s'affiche:
Au premier lancement, la liste des machines est vide. Vous pouvez importer une configuration qui se trouve dans le fichier joint.
L'application fonctionne avec le localstorage du navigateur. Le bouton [Importer les données] importe et remplace le localstorage. A l'inverse, le bouton [Exporter les données] exporte tous les fichiers du localstorage dans un fichier json.
Après avoir importer la configuration ci-jointe, la fenêtre affiche 4 machines configurées.

Cliquez sur le bouton [Voir les machines]. La liste des machines est affichée:
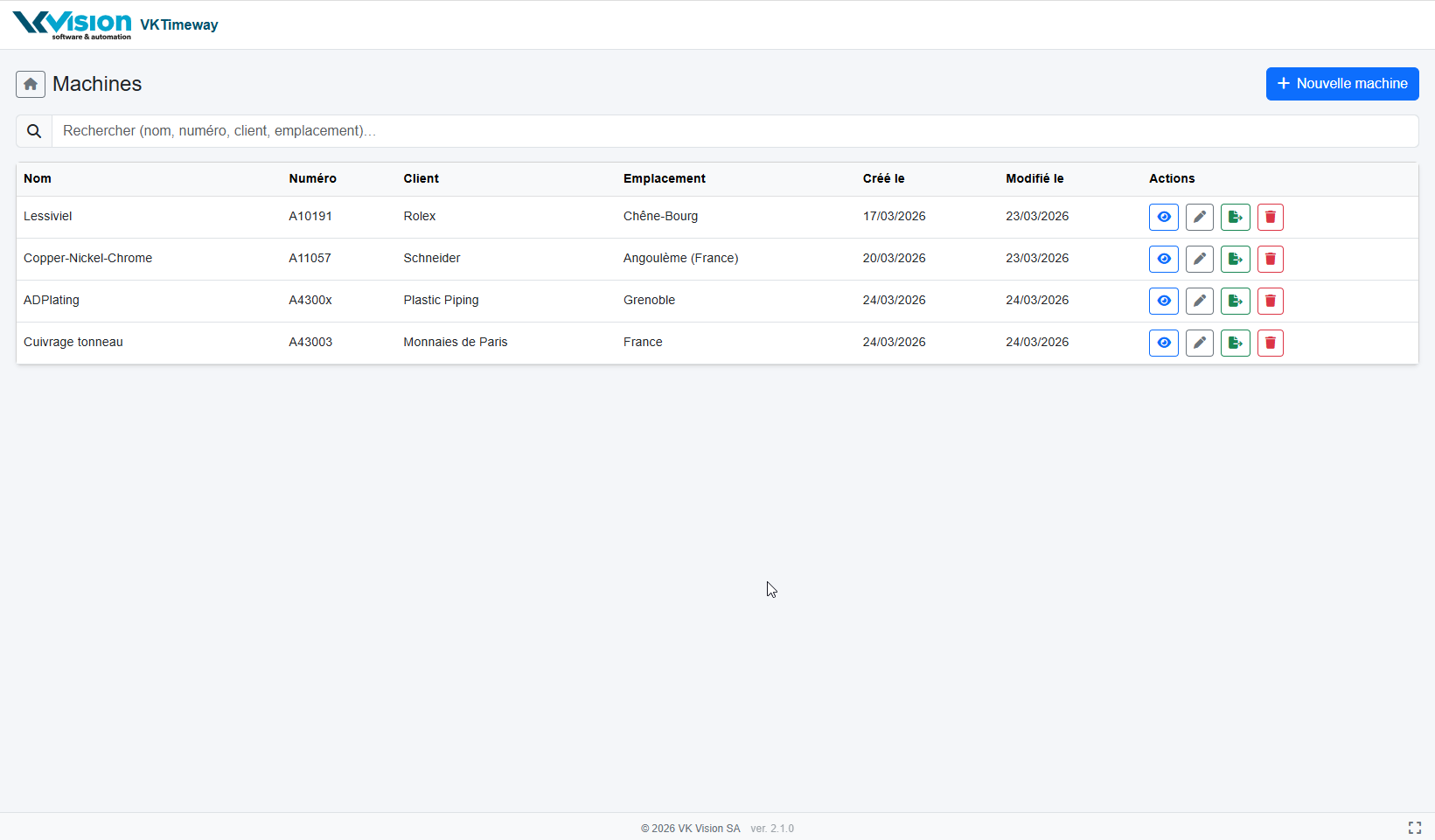
Sur cette page, vous pouvez sélectionner une machine ou en créer une nouvelle.
Pour créer une nouvelle machine, cliquez sur [+ Nouvelle machine], la page suivante s'affiche:
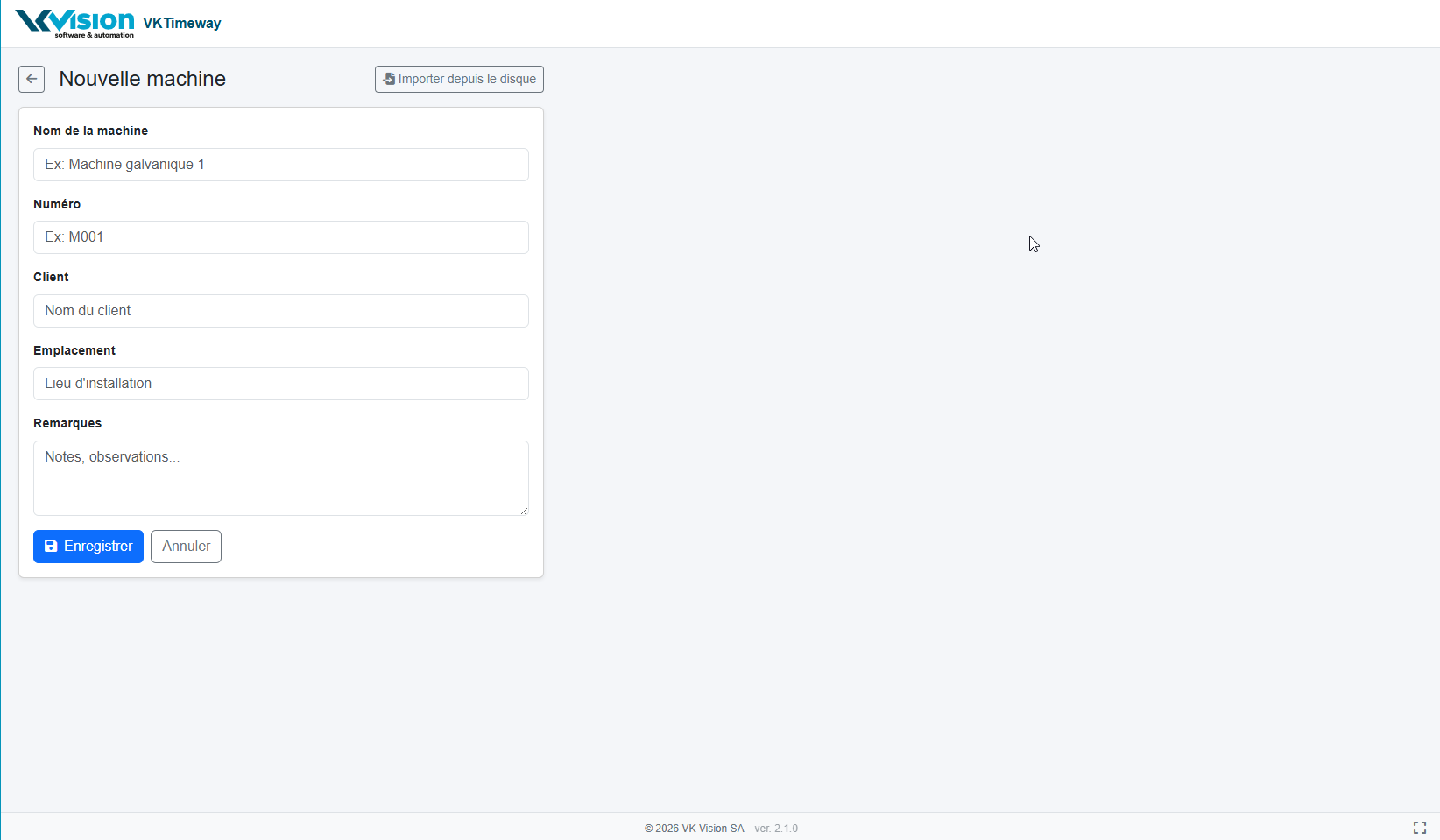
Vous pouvez définir tous les champs et cliquer sur [enregistrer]. La nouvelle machine sera créée. En cliquant sur [Importer depuis le disque], vous pouvez importer une configuration d'une machine de VKQuickView ou d'un diagramme exporté par l'ancienne version de VKTimeway.
Lorsque la nouvelle machine est créée, la page des versions s'affiche:
Si vous avez importé une configuration, une version sera créée dans la liste. Si vous avez uniquement rempli la fiche alors la liste sera vide.
Pour créer une nouvelle version, cliquez sur [+Nouvelle version]. La page suivante s'affichera:
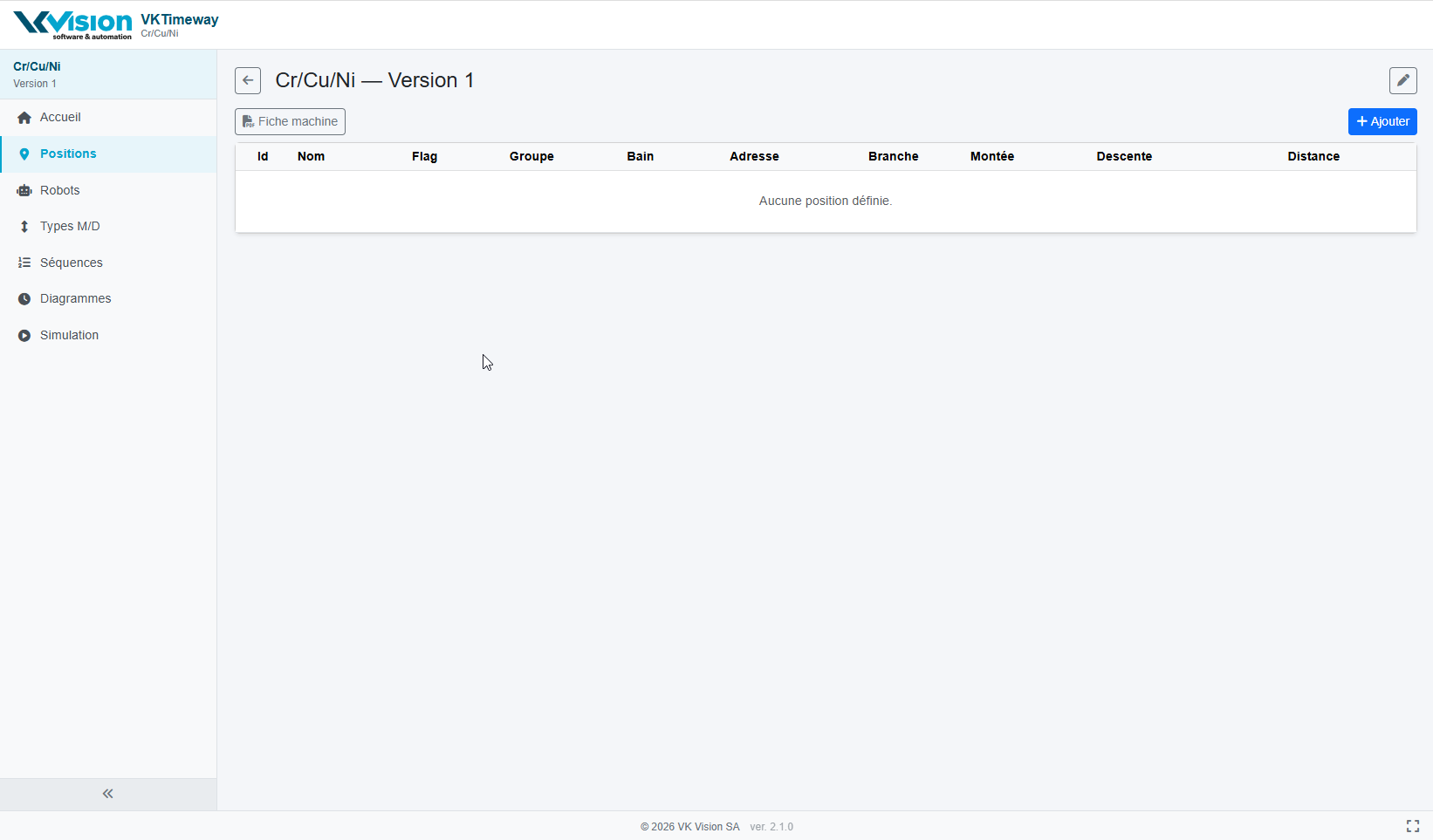
Cette page affiche la liste des positions de la machine. Les différentes fonctions disponibles sont les suivantes:
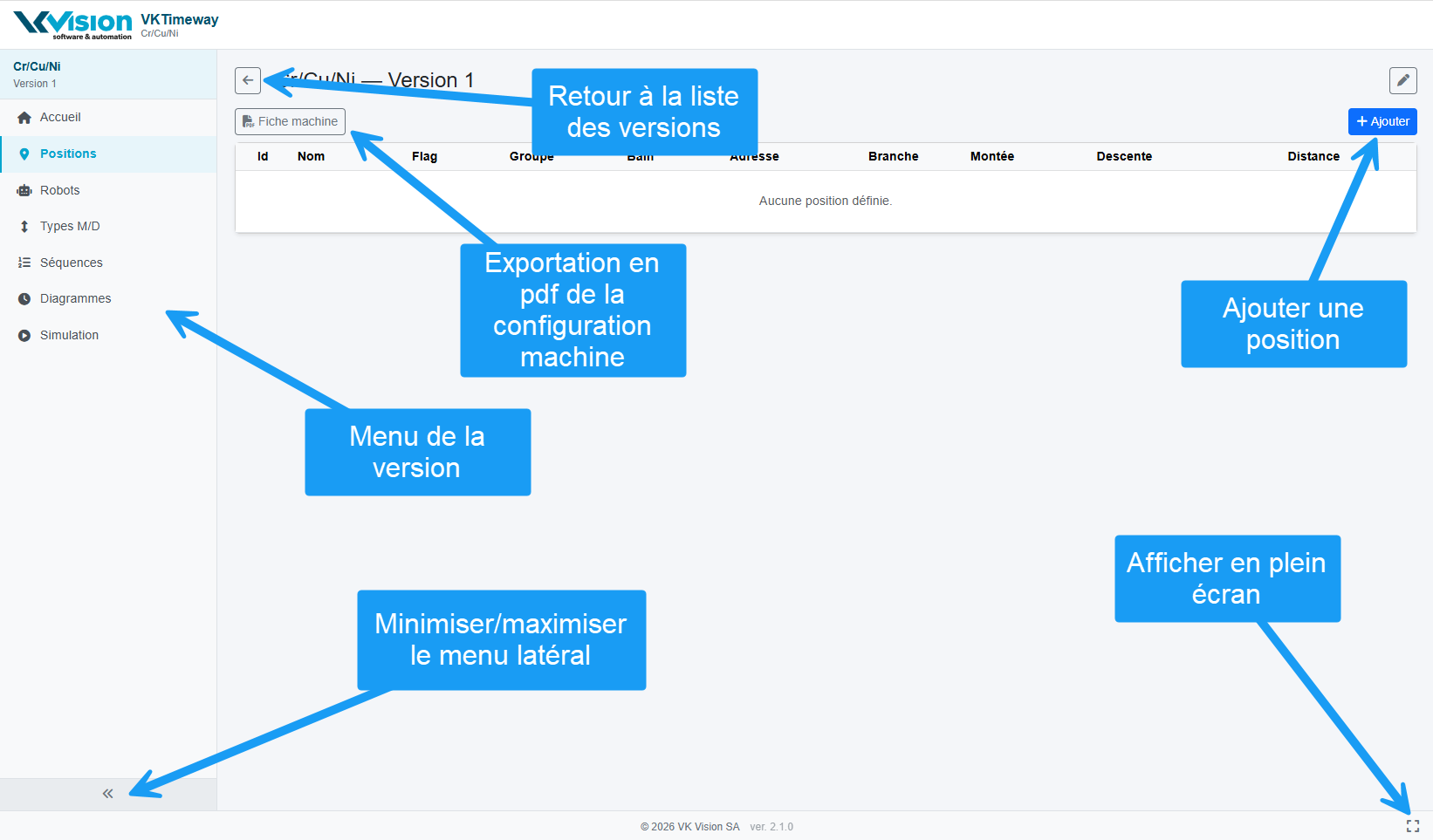
LesLe menu de navigation
| Commandes | Description |
| Acceuil | Retour à la page d'accueil de l'application |
| Positions | Edition des positions de la machine |
| Robots | Edition des robots |
| Type M/D | Edition des types de montées/descentes effectués par les robots |
| Séquences | Editeur de séquences |
| Diagrammes | Editeur de diagrammes |
| Simulation | Simulation des diagrammes |
Edition des positions de la machine
Pour ajouter une nouvelle position, cliquez sur [+Ajouter]. La boîte de dialogue suivante s'affiche:
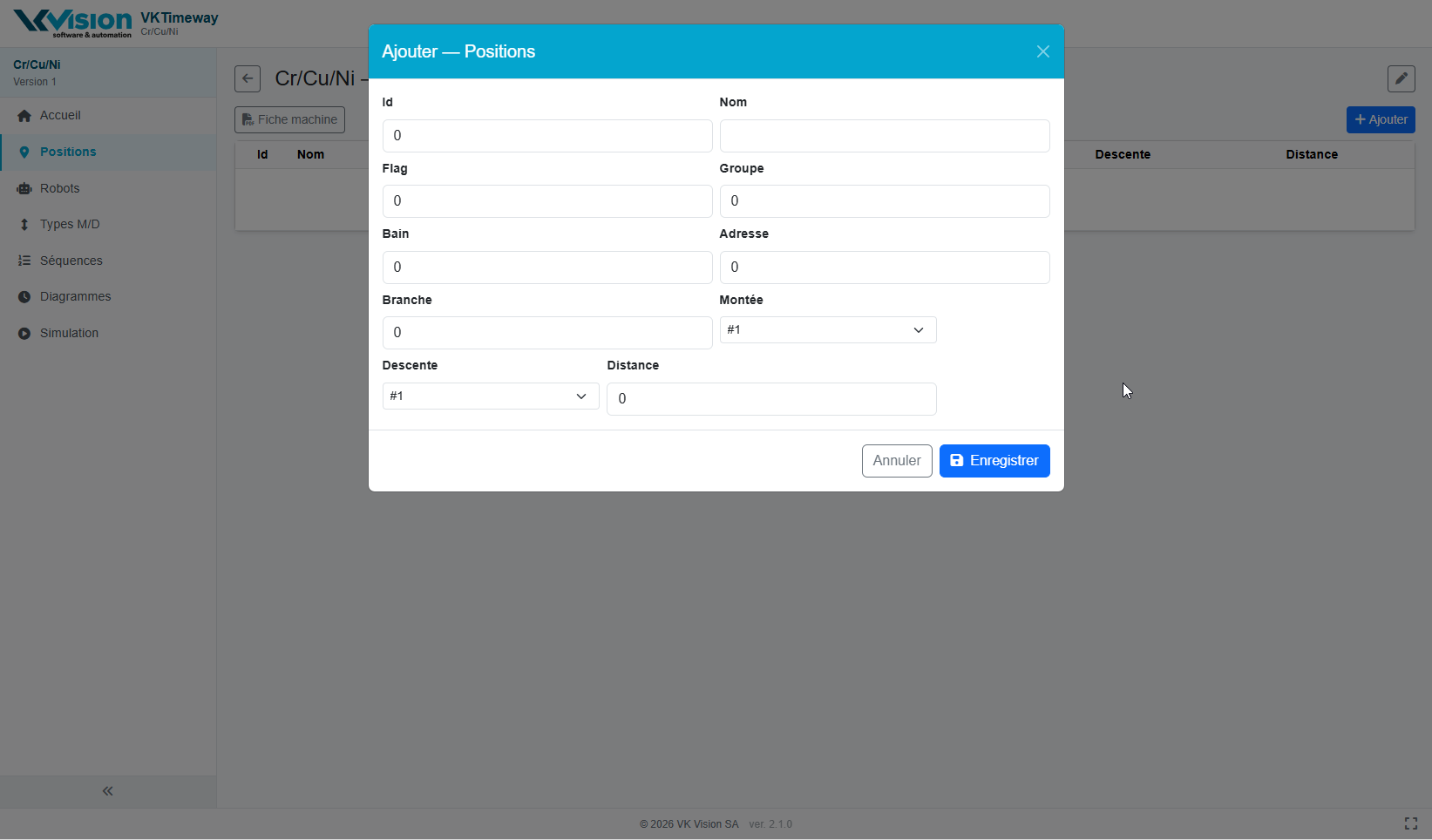
Pour chaque position, les champs suivants sont disponibles:
Lorsque toutes les positions sont définies, la liste se présente comme suit:
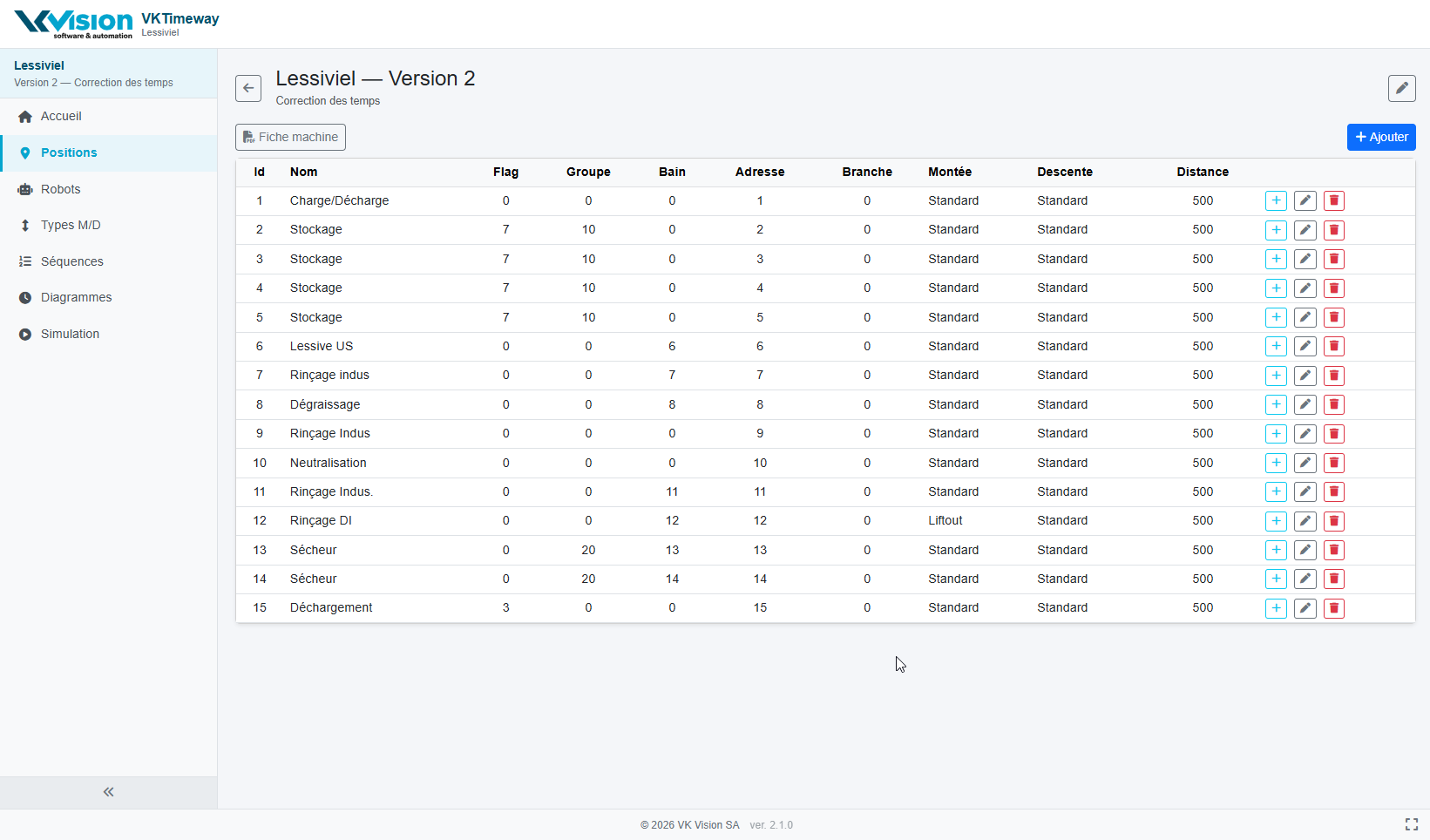
Sur chaque position, vous pouvez insérer une position [+] ou éditer une position ou effacer la position.
Edition des robots
Pour ajouter un robot, cliquez sur [+Ajouter]. La boîte de dialogue suivante s'affiche:
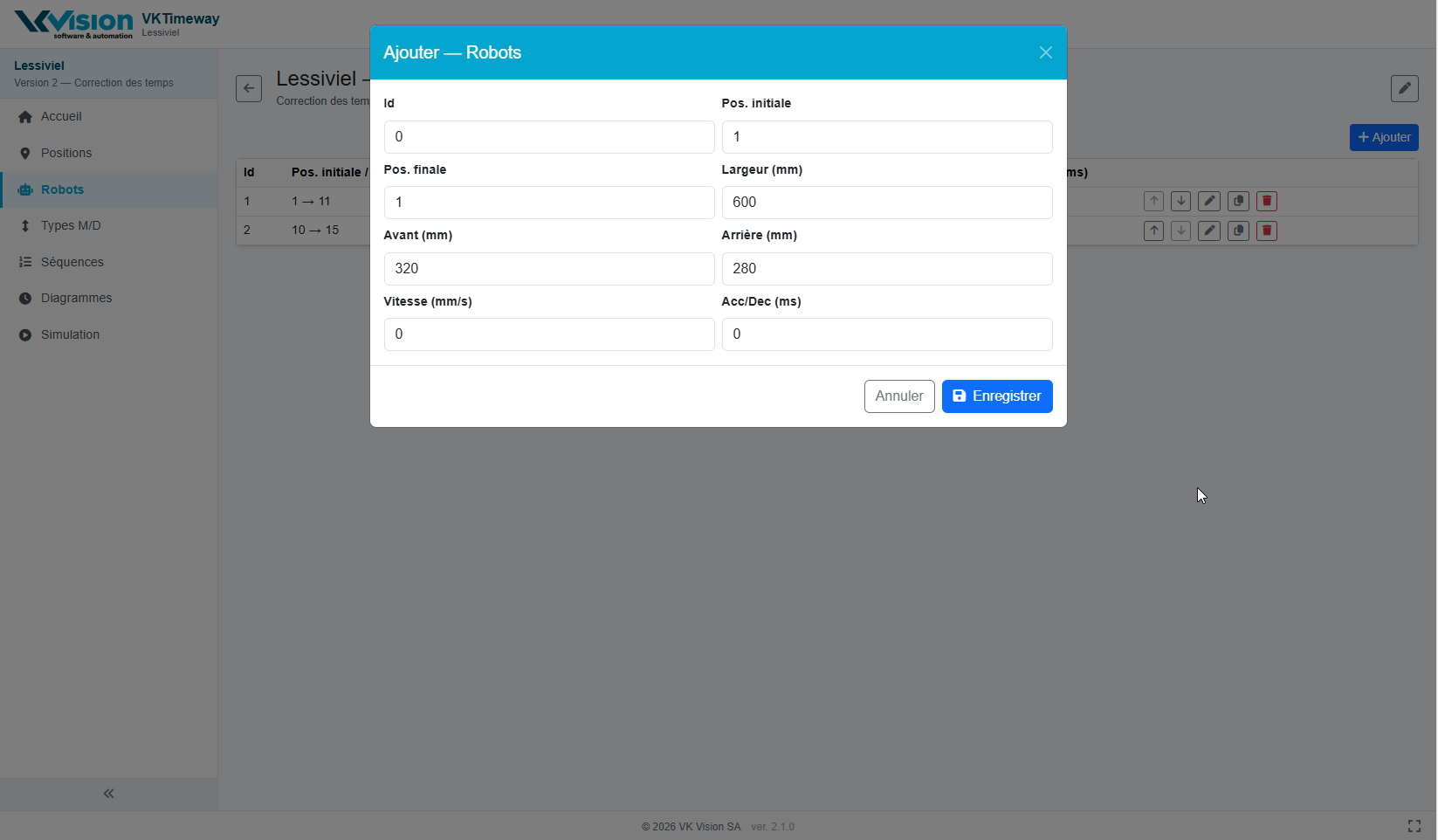
Pour chaque robot, les champs suivants sont disponibles:
Dans la liste des robots, sur chaque robot vous pouvez déplacer le robot vers le haut ou vers le bas. Vous pouvez éditer les champs du robot. Vous pouvez copier un robot en ajoutant la copie à la fin de la liste. Vous pouvez également supprimer le robot.
Edition des types de montées/descentes
Il est possible de définir 10 types de montées et 10 types de descentes.
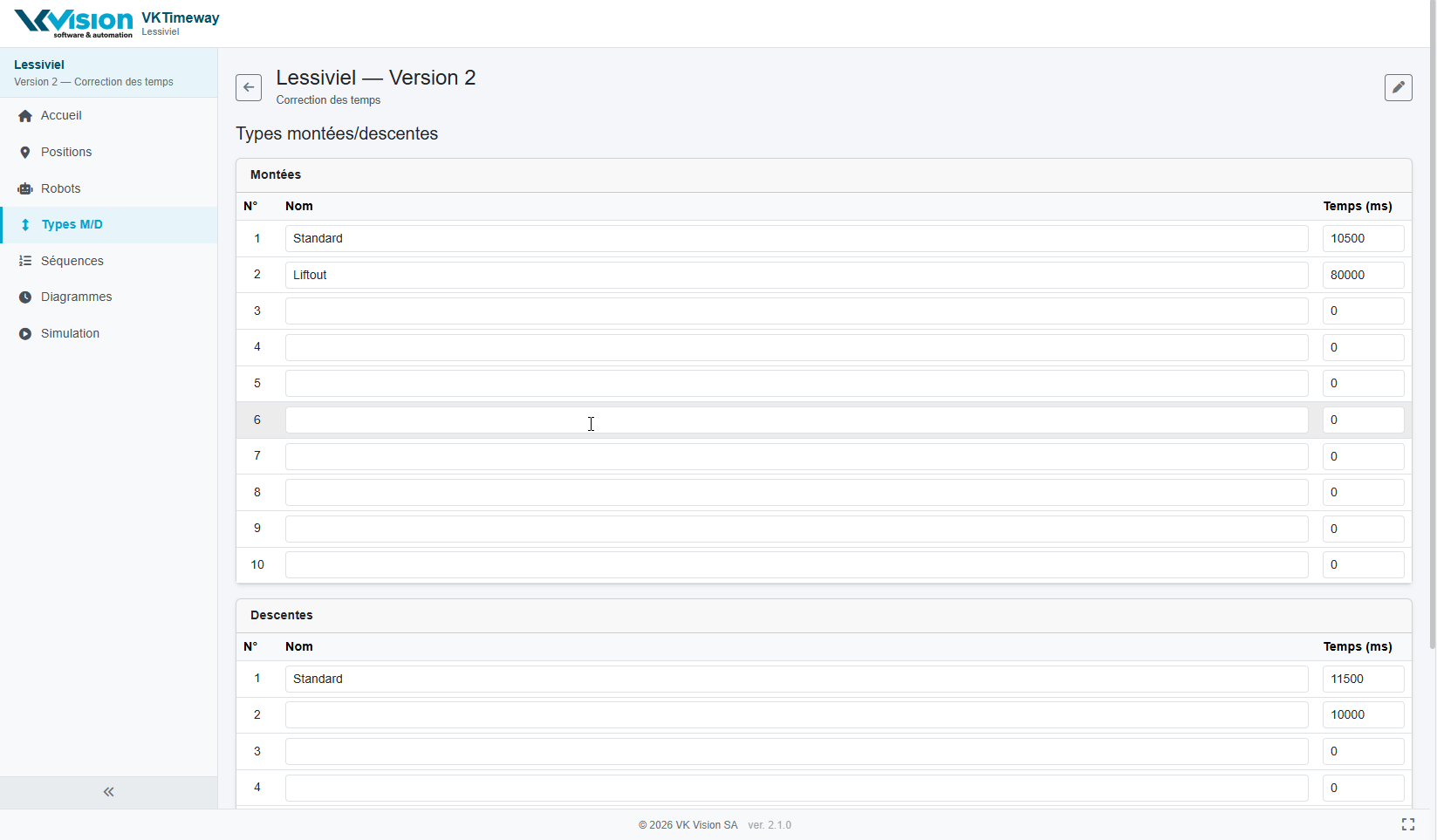
Vous pouvez donner une nom à chaque type ainsi qu'une durée en ms.