L'interface avec le contrôleur de transporteur CB99A
Dans une installation de traitement de surface, le système VK envoi les commandes de déplacement à l'automate programmable. Ce dernier est responsable de contrôler le déplacement et de positionnement des transporteurs. Le système VK gère l'anticollision avant l'envoi d'une nouvelle commande. Par exemple, si le système doit envoyer le transporteur 1 à la position 10 et que le transporteur 2 se trouve sur la position 9, il ordonnera d'abord au transporteur 2 de se déplacer à une position suffisamment éloignée pour ne pas entrer en collision avec le transporteur 1. La commande de déplacement du transporteur 1 sera envoyée une fois que le transporteur 2 est en dehors de la zone de collision.
Pour gagner du temps lors des déplacements, un mode " unsafe " peut être activé sur le système VK lui permettant d'envoyer les commandes de déplacement en parallèle. Dans notre exemple, le système envoi la commande de déplacement au robot 2 et dès que le système voit que le robot 2 est effectivement en train de se déplacer vers la position de destination, il envoi la commande au robot 1. Ce mode impose les fonctions suivantes :
1) Les transporteurs doivent tous avoir la même vitesse de déplacement.
2) Un système d'anticollision doit être implémenté dans l'automate programmable.
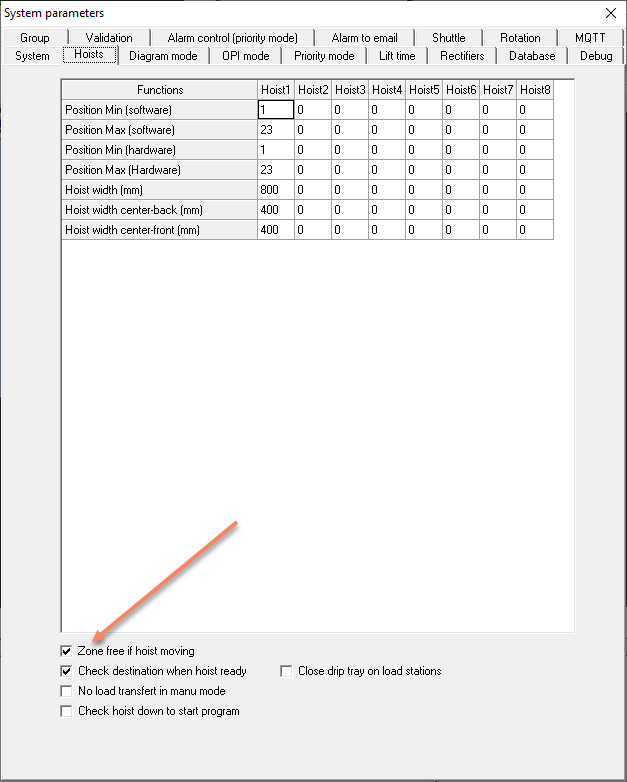
Ce mode est activé dans l'onglet [Hoist] de la page des paramètres du serveur:
Les registres d'échange
Les registres de commande et de statut sont définis comme suit:
|
Registre |
Type |
Direction |
Description |
|
0 |
Word |
PLC->VK |
Statut du transporteur: bit 0..6: position actuelle Bit 7: le transporteur est en bas Bit 8: le transporteur est en haut Bit 9: le transporteur se déplace horizontalement Bit 10: le transporteur monte Bit 11: le transporteur descend Bit 12: bac d'égouttage fermé Bit 13: le transporteur est à la hauteur Up1/2 Bit 14: le transporteur est prêt Bit 15: toggle nouvelle commande. |
|
1 |
Word |
PLC->VK |
Alarmes du transporteur |
|
2 |
Word |
PLC->VK |
Bit 0: Fermeture du bac d'égouttage |
|
3 |
Word |
PLC->VK |
Mode du transporteur: Bit 0..3: Mode du transporteur ( 0: OFF, 1: Manu, 2: Semi, 4: Auto, 8: Init) Bit 4: Le transporteur est à la hauteur HLiftout (nouveau) |
|
4 |
Word |
VK-PLC |
Consigne de vitesse de rotation |
|
5 |
Word |
VK->PLC |
Commande à exécuter: Bit 0..3: Commande à exécuter
Bit 15: trigger nouvelle commande (inversé à chaque commande) |