Les paramètres du système prioritaire
Introduction
Les paramètres du système prioritaire sont accessibles depuis l'onglet [Priority mode ] des paramètres du serveur:
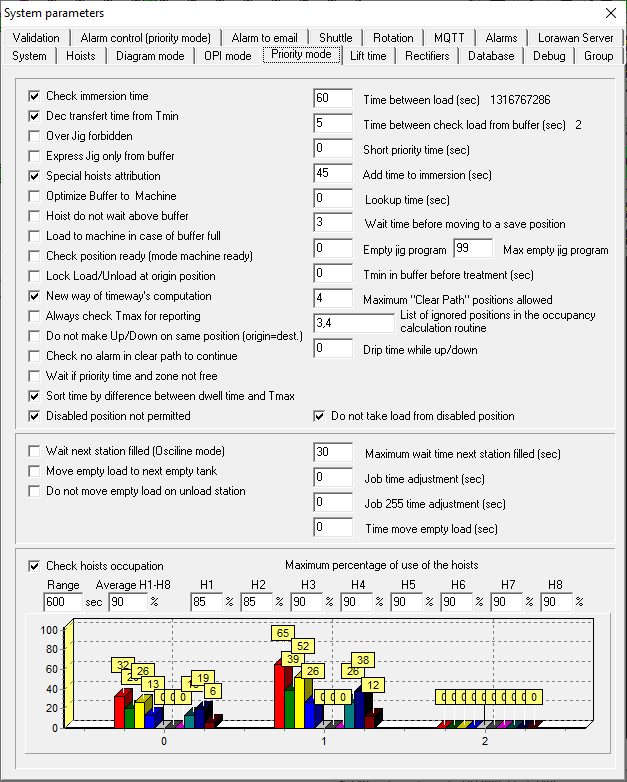
Ces paramètres permettent de modifier le comportement du système prioritaire.
Le système prioritaire
Le système prioritaire gère le déplacement des robots sur une ligne de traitement de surfaces. Contrairement à un système optimisé, le système prioritaire ne calcule pas entièrement le diagramme des mouvements des robots mais estime le bon moment pour lancer une charge dans la machine. Une fois les charges lancées dans la machine, les robots seront appelés pour déplacer celle-ci selon un ordre de priorité défini dans les séquences:
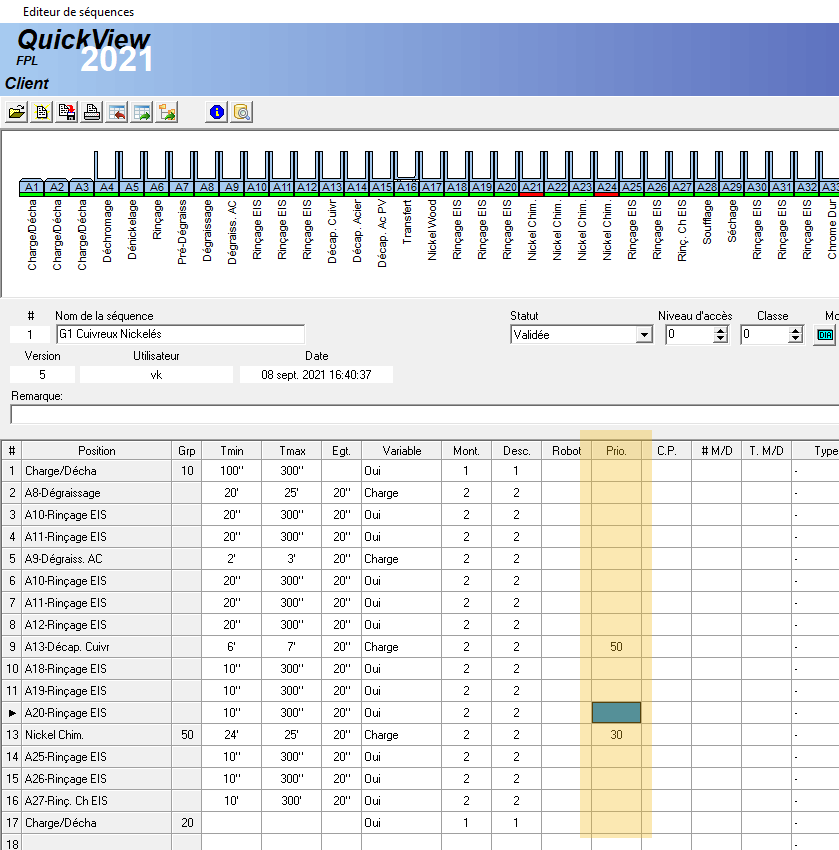
Les priorités sont définissables de 0 à 255. 0 correspond à la priorité la plus basse et 255 la plus élevé. Cette dernière a également une signification importante c'est qu'une fois la charge déposée dans la cuve, le robot attendra sur la position pendant tout le temps défini dans le Tmin . Le robot sera bloqué pour toutes les autres charges.
Avant de lancer une charge, le système calcule l'occupation des positions dans lesquelles la charge devra passer. Si l'occupation des cuves est vérifié et que le système permet de chargement alors la charge est définie comme démarrée et la couleur de celle-ci dans la machine passe en vert-claire. Elle est alors traitée comme n'importe quelle autre charge dans la ligne.
Dans un système prioritaire, ce sont les cuves qui appellent un robot pour déplacer la charge. Lorsque le temps d'immersion Tmin est atteint, la cuve s'ajoute dans une liste de charges à déplacer. A chaque seconde, le système trie cette liste par ordre de priorité et cherche un robot libre pouvant effectuer le mouvement.
Les paramètres prioritaires
Check immersion time
Ce paramètre devrait toujours être coché. Il indique au système de calculer l'utilisation des cuves dans le temps lors de la validation du démarrage de la charge. Si ce paramètre n'est pas coché alors aucun vérification de l'utilisation des cuves n'est effectuée.
Dec transfert time from Tmin
La cuve est ajoutée dans la liste des charges à déplacer lorsque son temps d'immersion a atteint son Tmin. Lorsque ce paramètre est coché alors le temps de déplacement du robot (le plus susceptible pour faire le déplacement) de sa position actuelle à la cuve est décompté du Tmin pour anticiper l'appel du robot. Ceci permet que le robot soit prêt à prendre la charge une fois le Tmin atteint.
Over jig forbidden
Lors de l'utilisation de certains outillage encombrant, il faut interdire de passer une charge par dessus une autre charge dans la ligne. Ce paramètre permet cette fonctionnalité.
Express jig only from buffer
Si ce paramètre est coché, seules les charges ayant été définies comme "Prioritaires" sur le poste de charge seront prises en compte lors du chargement de la machine. En fait, si dans la gare il existe des charges "prioritaires" et des charges "non prioritaire", le système attendra que toutes les charges "prioritaires" soient chargées avant d'essayer de charger les charges "non prioritaires"
Special hoist attribution
Ce paramètre doit être coché sur les nouvelles machine. Il est là pour être compatible avec les anciens systèmes. Ce paramètre permet d'attribuer un robot à un mouvement même si le mouvement sort des marges "logicielles" des positions min et max. Cela permet d'attribuer un robot à un mouvement lorsque le robot "naturel" est occupé par un autre mouvement.
Optimize Buffer to machine
Ce paramètre permet d'utiliser un autre robot que le robot "naturel" pour venir chercher une charge dans le buffer et l'envoyer en machine. Ce paramètre doit être utilisé que sur certaines machines ayant une configuration spéciale.
Hoist do not wait above buffer
Si ce paramètre est coché alors les robots ne resteront pas sur une position de la gare pour attendre mais ils se déplaceront sur une position d'attente.
Load to machine in case of buffer full
Ce paramètre permet de charger un charge directement en machine sans passer par la gare dans le cas où cette dernière serai pleine (pas de position libre).
Check position ready (mode machine ready)
Lorsque ce paramètre est coché, le système vérifie que chaque position définie dans la séquence soit "prête" (cuve pas dessinée en mauve). Si toutes les cuves sont prêtes alors le chargement est autorisé. Dans le cas contraire, la charge reste en jaune et un message affiche le message "Le mode de démarrage n'est pas vérifié"
Lock load/unload at origin position
Ce paramètre permet de bloquer les postes de charge/décharge dès la position d'origine du robot au lieu de les bloquer avant une montée/descente sur le poste de charge/décharge.
New way of timeway's computation
Ce paramètre modifie la manière de calculer le diagramme de mouvements. Sans ce paramètre, le diagramme est calculé selon les séquences et les temps définis dans Tmin. Avec ce paramètre, le digramme est calculé également selon les séquences et le temps définis dans Tmin mais certains temps peuvent être modifiés selon l'occupation des cuves. Ceci permet d'optimiser le chargement de la machine.
Always check Tmax for reporting
Normalement le système indique une charge en erreur lorsqu'une priorité a été définie et que le temps dépasse le Tmax. Si ce paramètre est coché alors le système indiquera une erreur sur toutes les positions où le TMax est dépassé sans tenir compte du fait que la position ai une priorité ou non.
Do not make up/down on same position (origin = destination)
Il est possible de définir dans une séquence plusieurs fois la même position de suite (utilisé par exemple pour permettre des densités de courant différentes pendant l'immersion). Dans un cas normal, lorsque l'immersion a atteint le Tmin, un robot vient prendre la charge et la dépose dans la destination mais comme dans ce cas la destination et la même que la position alors le robot fera une montée/descente sur la position. Ce paramètre permet de ne pas faire cette montée/descente et seulement continuer avec les paramètres de la deuxième ou nème immersion.
Check no alarm in clear path to continue
Lorsqu'un "clear path" est défini sur un pas de la séquence, si ce paramètre est coché alors le système vérifiera qu'il n'y a pas d'alarme dans les positions du "clear path" avant d'autoriser la charge à ce déplacer.
Wait if priority time and zone not free
Lorsqu'une priorité 255 est définie dans une position, le robot est bloqué sur cette pendant tout l'immersion mais seulement à condition que la zone occupé par le robot en sortie (position de destination) est libre. Dans le cas où la zone n'est pas libre, la priorité 255 ne bloque pas le robot sur la position et permet au robot de faire d'autre mouvements- Si ce paramètre est coché alors le robot passera dans une boucle d'attente sur la position même si la zone est occupée.
Sort time by difference between dwell time and Tmax
Ce paramètre permet de trier la liste des charges devant être déplacées avec comme paramètre la différence de temps entre le temps actuel d'immersion et le Tmax. Les temps les plus court seront traités en premier. Si ce paramètre n'est pas coché alors le Tmax n'interviendra pas dans le choix de l'ordre des charges à déplacer.
Disable position not permitted
Lors du calcul de démarrage d'une charge, le système vérifie que toutes les positions dans lesquelles la charge doit passer sont en service. Si une ou plusieurs positions sont hors service, le système interdira le chargement. Une fois démarrée, la charge pourra être déposée dans toutes les positions même si celles-ci ont été mises hors service après le départ. Ce paramètre interdira à une charge d'être déposée dans une position hors service. La charge attendra dans la position précédente que la position soit à nouveau en service.
Do not take load from disabled position
Normalement, une position dans laquelle une charge est déposée peut être mise hors service pour empêcher les charges suivantes d'y venir. Lorsque son temps d'immersion a atteint le TMin, le système demande à un robot de venir prendre la charge. En activant ce paramètre, les charges se trouvant dans une position hors service ne sont plus déplacées.
Time between load (sec)
Ce paramètre correspond au temps minimum (en secondes) entre 2 chargements. Il permet de limiter le nombre de charges en ligne.
Time between check load from buffer (sec)
Une fois le temps entre charge atteint, le système essaiera de charger la machine toutes les n secondes indiquées dans ce paramètre. Une valeur adéquate est 5 secondes. Il ne faut pas introduire une valeur inférieure pour ne pas surcharger le système.
Short priority time (sec)
Ce paramètre permet de gérer les charges ayant un temps Tmin plus petit que le temps indiqué dans ce paramètre comme si 255 avait été défini dans la priorité de la position. 0 indique que ce paramètre n'est pas utilisé.
Add time to immersion (sec)
Lors du calcul du diagramme de mouvement, le Tmin des positions est augmenté du nombre de secondes indiqués dans ce paramètre ce qui empêche que le test d'utilisation de la position soit autorisé aussitôt que le temps d'immersion se termine. Ce nombre de secondes correspond en général au temps nécessaire pour charger et décharger une position (environ 45 secondes).
Lockup time (sec)
Ce la valeur de ce paramètre indique au système un temps qu'il faut déduire du Tmin avant l'appel d'un robot. Ce temps est fixe pour toutes les positions contrairement au paramètre "Dec transfert time from Tmin" qui est individuel pour chaque position.
Wait time before moving to a safe position
Ce paramètre indique en secondes après combien de temps le robot est envoyé sur une position de type "Safe" (pouvant rester dessus) lorsqu'il est positionné sur une position sur laquelle il n'a pas le droit de rester.
Empty jig program & Max empty jig program
Ces paramètres sont utilisés pour forcer un programme pour rack vide lorsqu'une charge doit entrer dans une position occupée par un rack vide. Le système essaie d'attribuer le programme "Empty jig program" à la charge. Si ce n'est pas possible (la position ne se trouve pas dans la séquence), il essaie avec le programme "Empty jig program"+1 et ainsi de suite jusqu'à "Max empty jig program". Lorsqu'un programme est trouvé, le programme est attribué au rack vide et celui-ci passe en couleur bleu indiquant un rack avec programme rack-vide.
Tmin in buffer before treatement (sec)
Ce paramètre indique en secondes le temps minimum qu'une charge doit rester dans la gare de chargement avant d'être intégré en ligne.
Maximum "Clear path" position allowed
Ce paramètre permet de limiter le nombre de positions de "Clear path" défini dans les pas de séquence. Si l'utilisateur a défini un nombre plus élevé que celui indiqué dans ce paramètre, le système tiendra compte uniquement de ce paramètre.
Liste of ignored positions in the occupancy calculation routine
Ce paramètre contient une liste de position dont l'occupation n'est pas vérifier lors du calcul d'utilisation des positions. La liste correspond aux numéros de position séparés par une virgule.
Drip time while up/down
Ce paramètre permet de définir un temps d'égouttage lorsque des montées/descentes sont programmées sur les positions.
Les paramètres OSCILine