Les paramètres du système prioritaire
Introduction
Les paramètres du système prioritaire sont accessibles depuis l'onglet [Priority mode ] des paramètres du serveur:
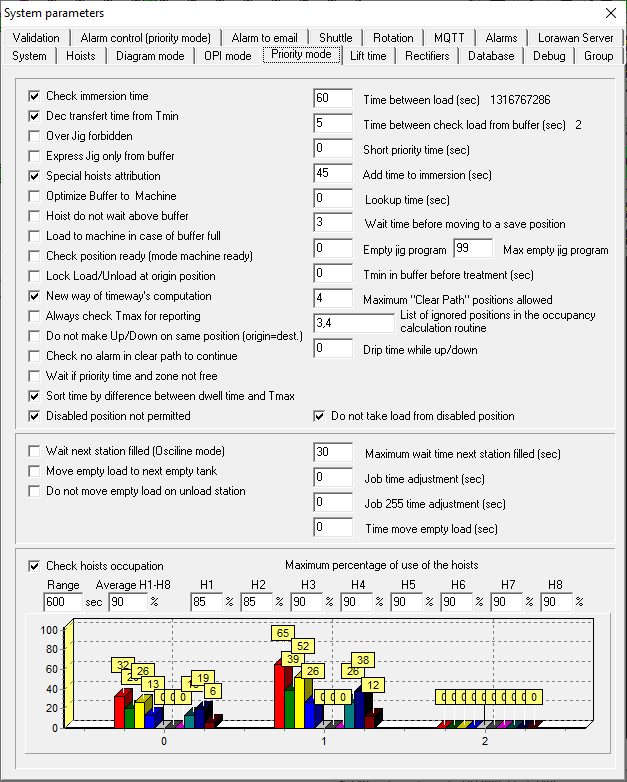
Ces paramètres permettent de modifier le comportement du système prioritaire.
Le système prioritaire
Le système prioritaire gère le déplacement des robots sur une ligne de traitement de surfaces. Contrairement à un système optimisé, le système prioritaire ne calcule pas entièrement le diagramme des mouvements des robots mais estime le bon moment pour lancer une charge dans la machine. Une fois les charges lancées dans la machine, les robots seront appelés pour déplacer celle-ci selon un ordre de priorité défini dans les séquences:
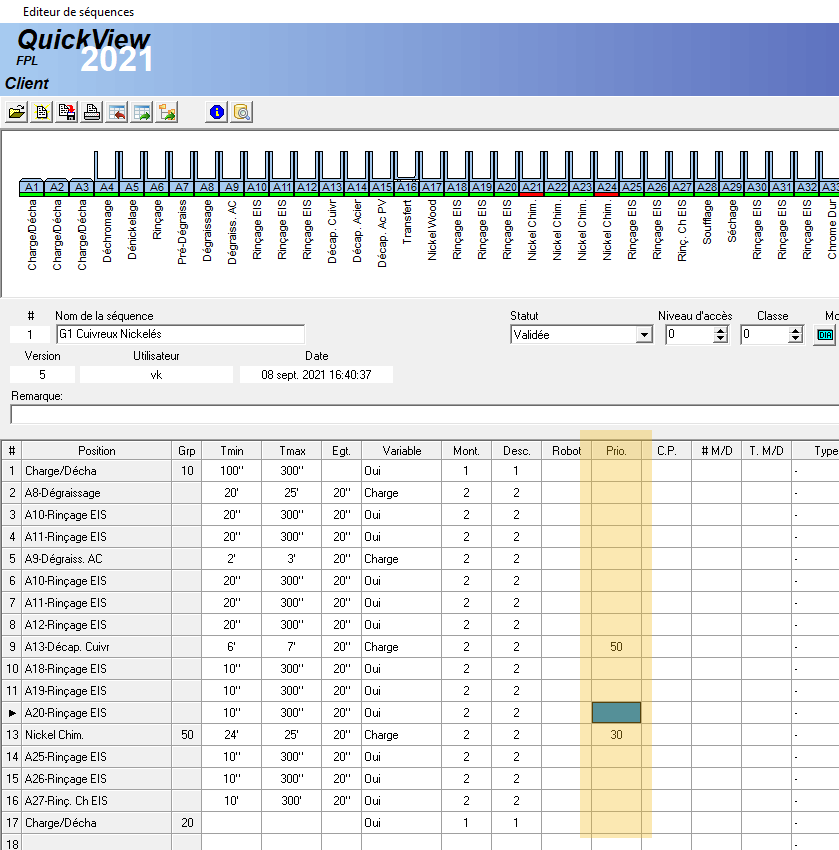
Les priorités sont définissables de 0 à 255. 0 correspond à la priorité la plus basse et 255 la plus élevé. Cette dernière a également une signification importante c'est qu'une fois la charge déposée dans la cuve, le robot attendra sur la position pendant tout le temps défini dans le Tmin . Le robot sera bloqué pour toutes les autres charges.
Avant de lancer une charge, le système calcule l'occupation des positions dans lesquelles la charge devra passer. Si l'occupation des cuves est vérifié et que le système permet de chargement alors la charge est définie comme démarrée et la couleur de celle-ci dans la machine passe en vert-claire. Elle est alors traitée comme n'importe quelle autre charge dans la ligne.
Dans un système prioritaire, ce sont les cuves qui appellent un robot pour déplacer la charge. Lorsque le temps d'immersion Tmin est atteint, la cuve s'ajoute dans une liste de charges à déplacer. A chaque seconde, le système trie cette liste par ordre de priorité et cherche un robot libre pouvant effectuer le mouvement.
Les paramètres
Check immersion time
Ce paramètre devrait toujours être coché. Il indique au système de calculer l'utilisation des cuves dans le temps lors de la validation du démarrage de la charge. Si ce paramètre n'est pas coché alors aucun vérification de l'utilisation des cuves n'est effectuée.
Dec transfert time from Tmin
La cuve est ajoutée dans la liste des charges à déplacer lorsque son temps d'immersion a atteint son Tmin. Lorsque ce paramètre est coché alors le temps de déplacement du robot (le plus susceptible pour faire le déplacement) de sa position actuelle à la cuve est décompté du Tmin pour anticiper l'appel du robot. Ceci permet que le robot soit prêt à prendre la charge une fois le Tmin atteint.
Over jig forbidden
Lors de l'utilisation de certains outillage encombrant, il faut interdire de passer une charge par dessus une autre charge dans la ligne. Ce paramètre permet cette fonctionnalité.
Express jig only from buffer
Si ce paramètre est coché, seules les charges ayant été définies comme "Prioritaires" sur le poste de charge seront prises en compte lors du chargement de la machine. En fait, si dans la gare il existe des charges "prioritaires" et des charges "non prioritaire", le système attendra que toutes les charges "prioritaires" soient chargées avant d'essayer de charger les charges "non prioritaires"
Special hoist attribution
Ce paramètre doit être coché sur les nouvelles machine. Il est là pour être compatible avec les anciens systèmes. Ce paramètre permet d'attribuer un robot à un mouvement même si le mouvement sort des marges "logicielles" des positions min et max. Cela permet d'attribuer un robot à un mouvement lorsque le robot "naturel" est occupé par un autre mouvement.
Optimize Buffer to machine
Ce paramètre permet d'utiliser un autre robot que le robot "naturel" pour venir chercher une charge dans le buffer et l'envoyer en machine. Ce paramètre doit être utilisé que sur certaines machines ayant une configuration spéciale.
Hoist do not wait above buffer
Si ce paramètre est coché alors les robots ne resteront pas sur une position de la gare pour attendre mais ils se déplaceront sur une position d'attente.