Les paramètres du système prioritaire
Introduction
Les paramètres du système prioritaire sont accessibles depuis l'onglet [Priority mode ] des paramètres du serveur:
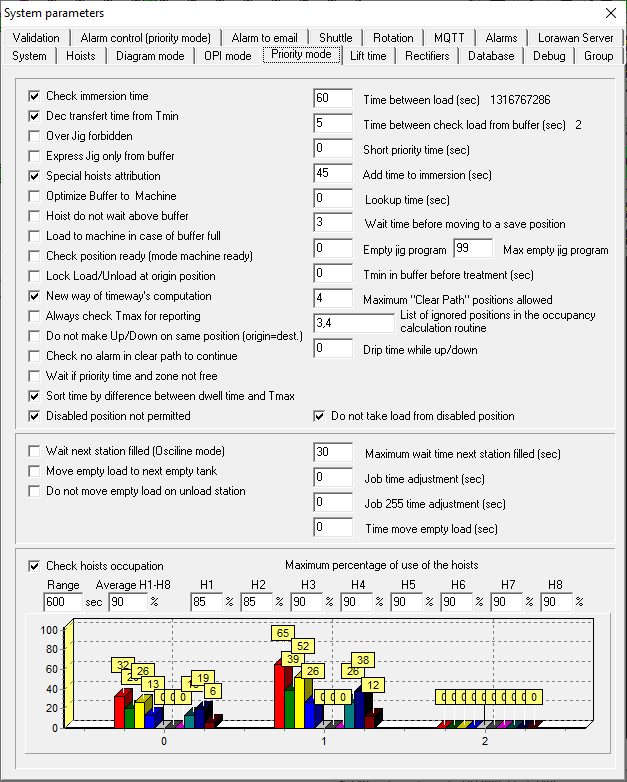
Ces paramètres permettent de modifier le comportement du système prioritaire.
Le système prioritaire
Le système prioritaire gère le déplacement des robots sur une ligne de traitement de surfaces. Contrairement à un système optimisé, le système prioritaire ne calcule pas entièrement le diagramme des mouvements des robots mais estime le bon moment pour lancer une charge dans la machine. Une fois les charges lancées dans la machine, les robots seront appelés pour déplacer celle-ci selon un ordre de priorité défini dans les séquences:
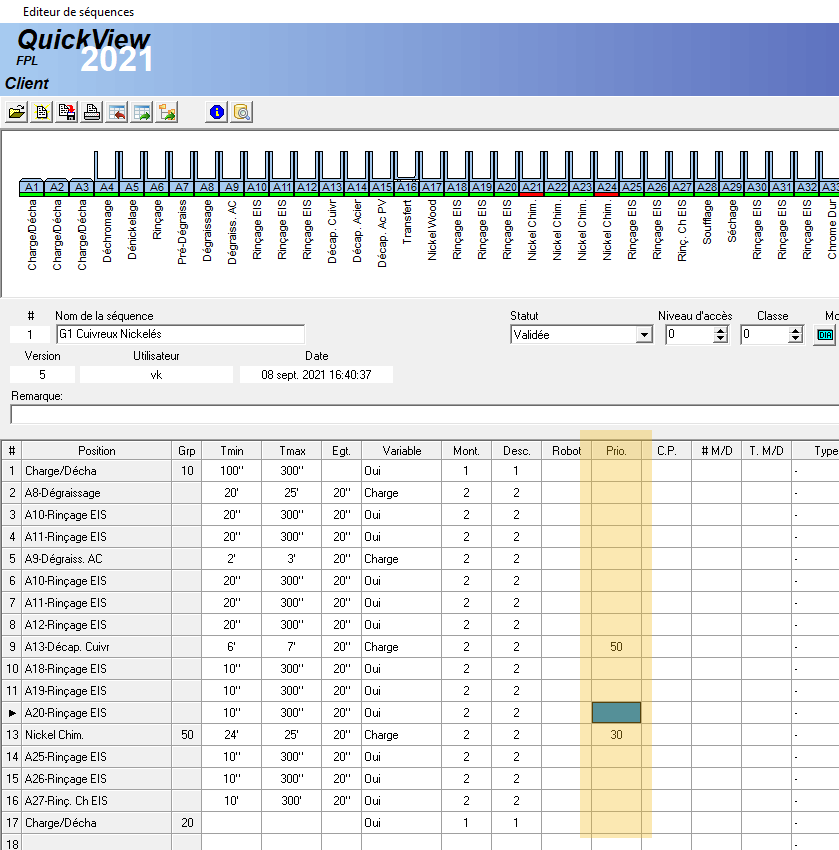
Les priorités sont définissables de 0 à 255. 0 correspond à la priorité la plus basse et 255 la plus élevé. Cette dernière a également une signification importante c'est qu'une fois la charge déposée dans la cuve, le robot attendra sur la position pendant tout le temps défini dans le Tmin . Le robot sera bloqué pour toutes les autres charges.